华东师范大学学报(自然科学版) ›› 2025, Vol. 2025 ›› Issue (6): 39-45.doi: 10.3969/j.issn.1000-5641.2025.06.005
庄泉洁1, 陈子娇2, 肖志睿1, 刘洪英2,*( )
)
Quanjie ZHUANG1, Zijiao CHEN2, Zhirui XIAO1, Hongying LIU2,*()
摘要:
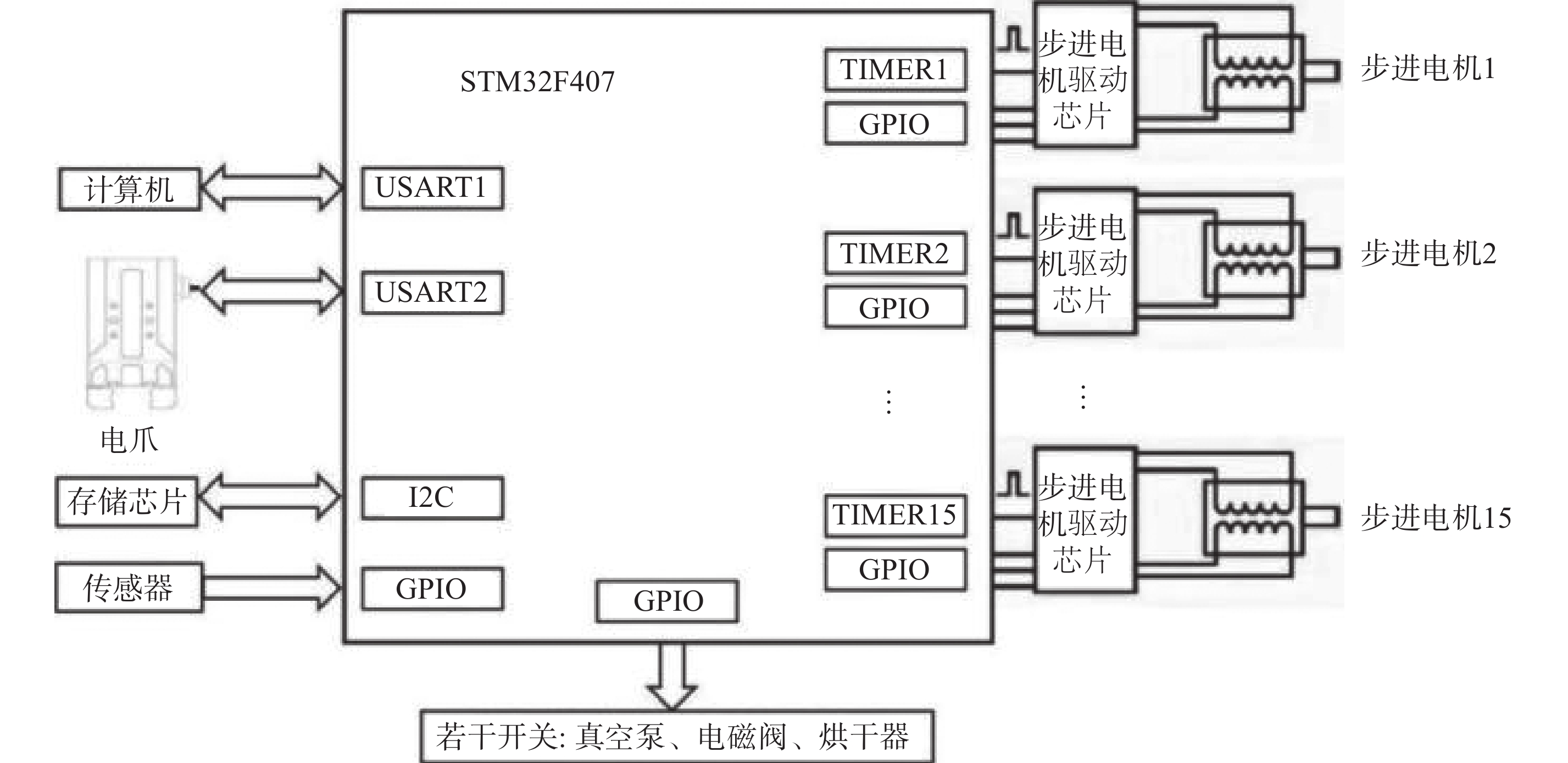
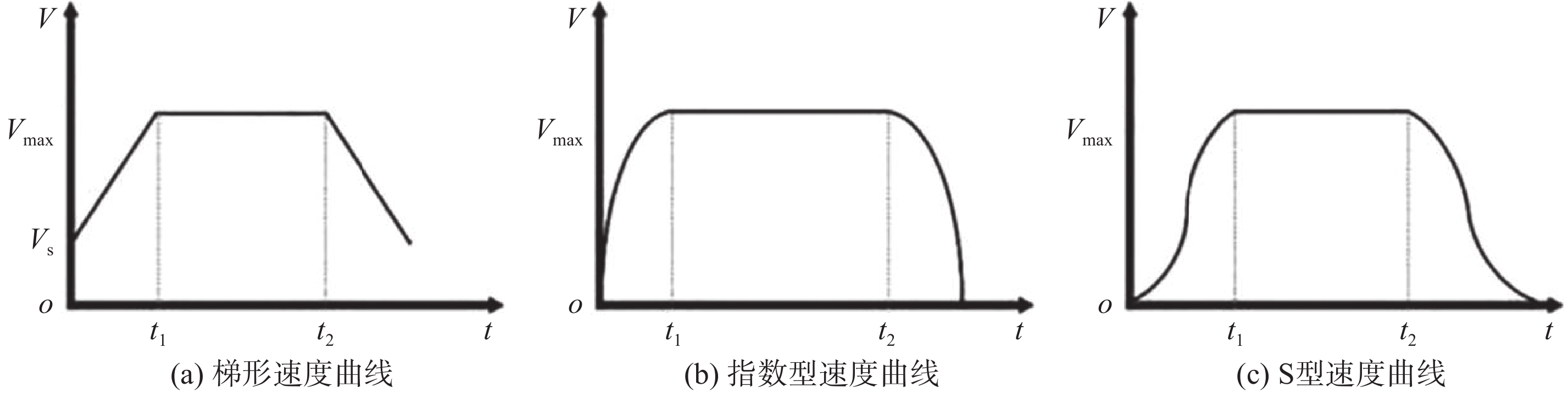
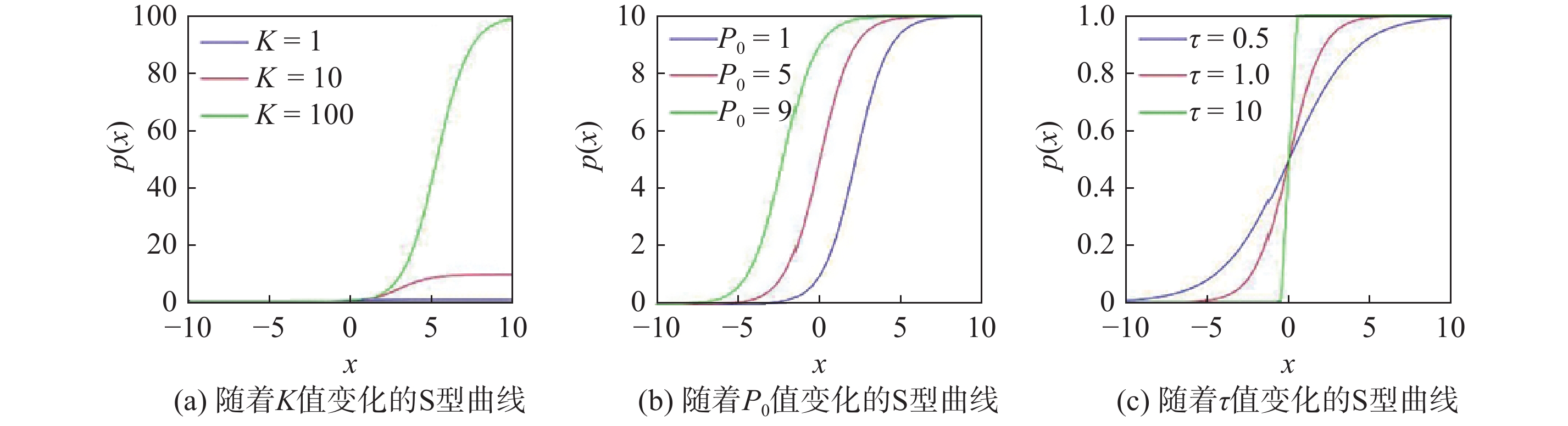
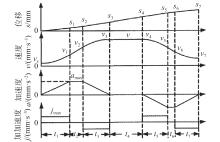
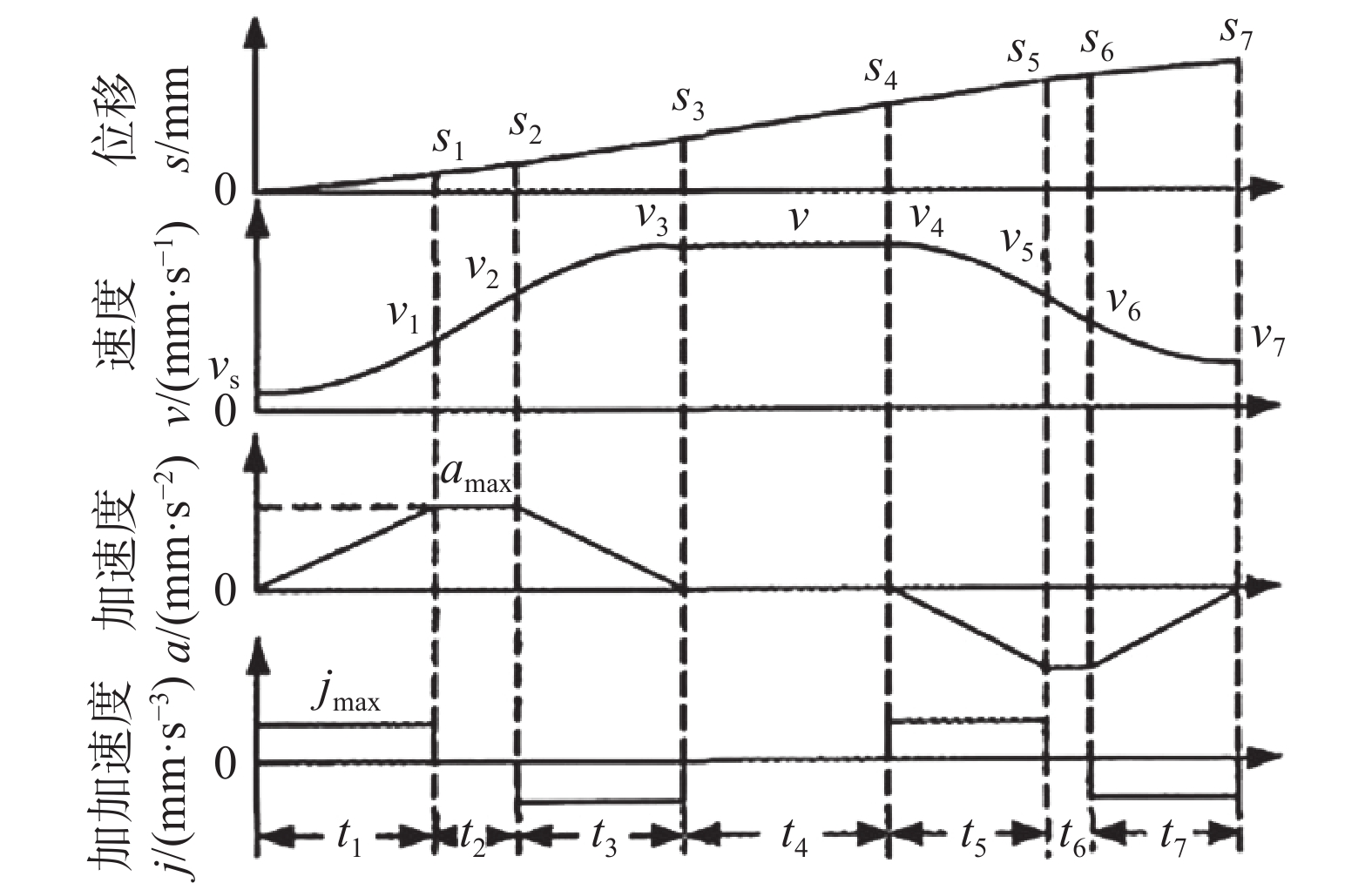
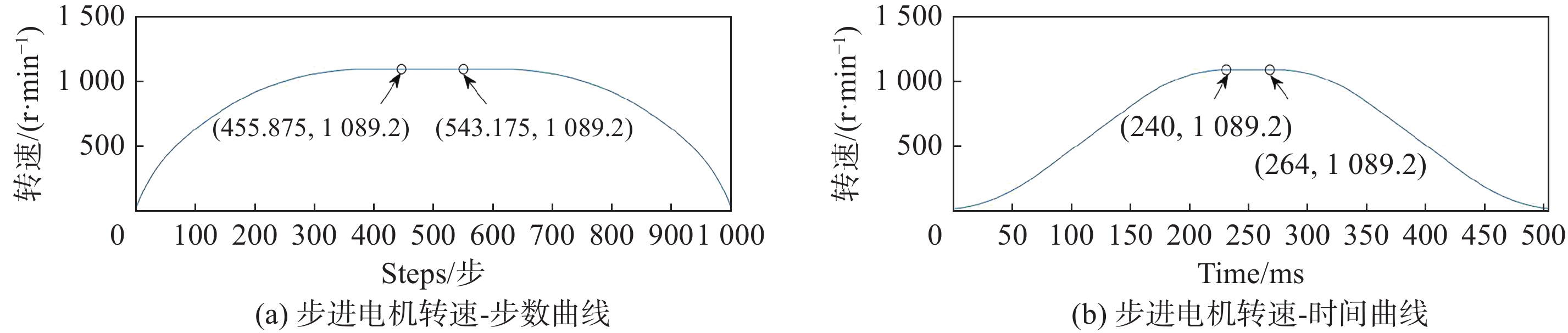
步进电机在整个全自动痰染片制片的工作流程中发挥着关键作用. 在电机的启动和停止过程中, 电机速度常常会发生急剧变化, 因此一个良好的电机启停控制算法显得尤为重要. 首先, 需要避免电机在突然高速启动时因所需力矩过大而导致的过载现象, 以保护电机不受损坏. 其次, 在减速过程中, 应防止高速运转的电机突然停止, 以减少对电机的惯性冲击, 降低由此产生的运动偏差. 致力于优化步进电机的启停控制算法, 在启停阶段采用S型曲线来实现电机转速的平稳变化. 这种S型速度变化曲线基于Logistic函数设计, 能够确保电机在启动和停止时速度平稳变化, 避免突然加速或减速带来的冲击. 同时, 电机的整体运动采用7段式加减速优化算法, 以实现对电机的有效控制. 以系统中的x方向电机控制为例, 仿真实验验证了该算法的有效性, 步进电机在启停区间, 其转速与时间的曲线呈S型变化, 保证了电机启停的平稳性. 实测结果显示, 采用S型加减速启停控制算法, 位置误差被控制在 ±0.05 mm以内, 相比梯形控制算法带来的 ±0.9 mm位置误差, 有了显著的减小, 这表明S型加减速启停控制算法在减小位置误差方面取得了良好效果.
中图分类号:
 中文核心期刊
中文核心期刊