 中国综合性科技类核心期刊(北大核心)
中国综合性科技类核心期刊(北大核心)Journal of East China Normal University(Natural Science) ›› 2023, Vol. 2023 ›› Issue (2): 95-105.doi: 10.3969/j.issn.1000-5641.2023.02.011
• Computer Science • Previous Articles Next Articles
Zhiwei JIN, Chang HUANG*( ), Ruihong ZHU
), Ruihong ZHU
Received:2021-10-09
Online:2023-03-25
Published:2023-03-23
Contact:
Chang HUANG
E-mail:chuang@ee.ecnu.edu.cn
CLC Number:
Zhiwei JIN, Chang HUANG, Ruihong ZHU. Fast establishment of a point cloud model for a lock pin based onhigh overlapping views[J]. Journal of East China Normal University(Natural Science), 2023, 2023(2): 95-105.

Fig.1
Point cloud filtering process"
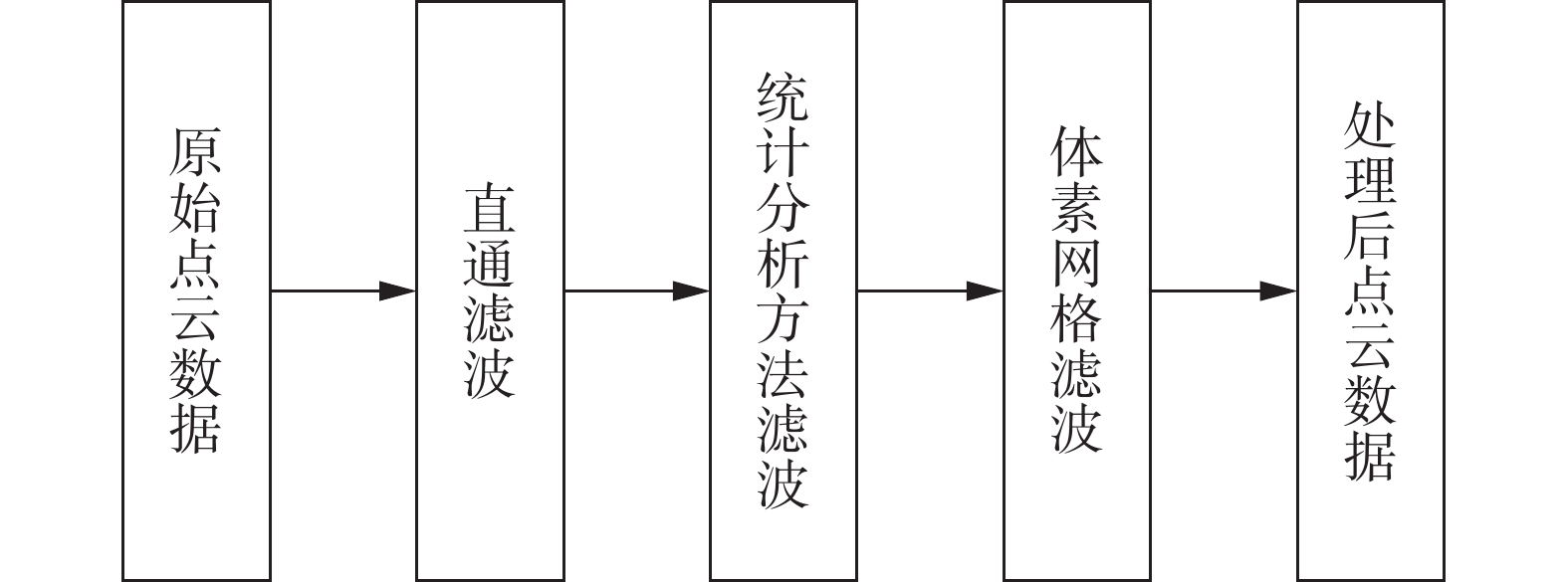

Fig.2
Influence area of FPFH"
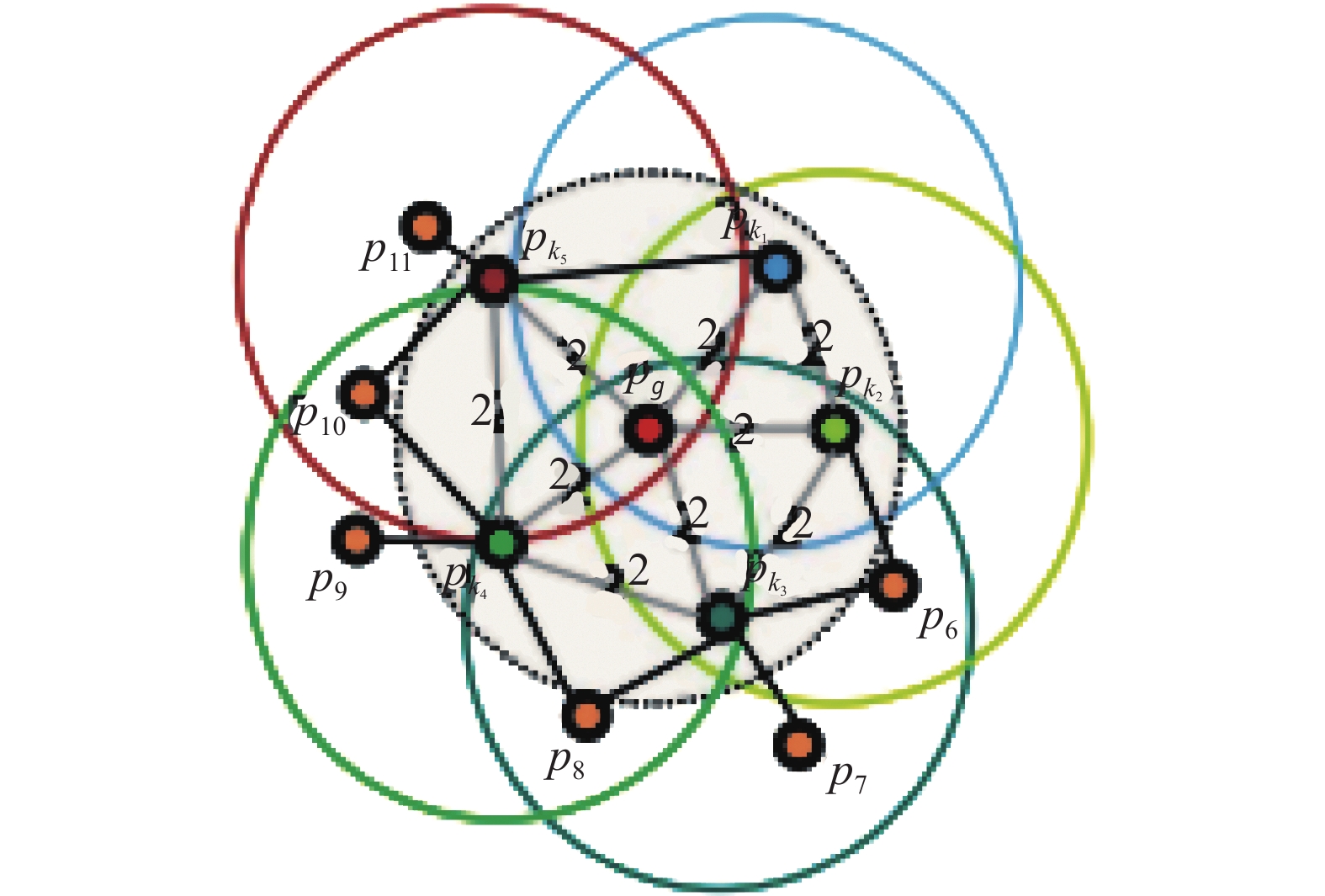

Fig.3
Top views of various lock pins"

Fig.4
Result of point cloud preprocessing"
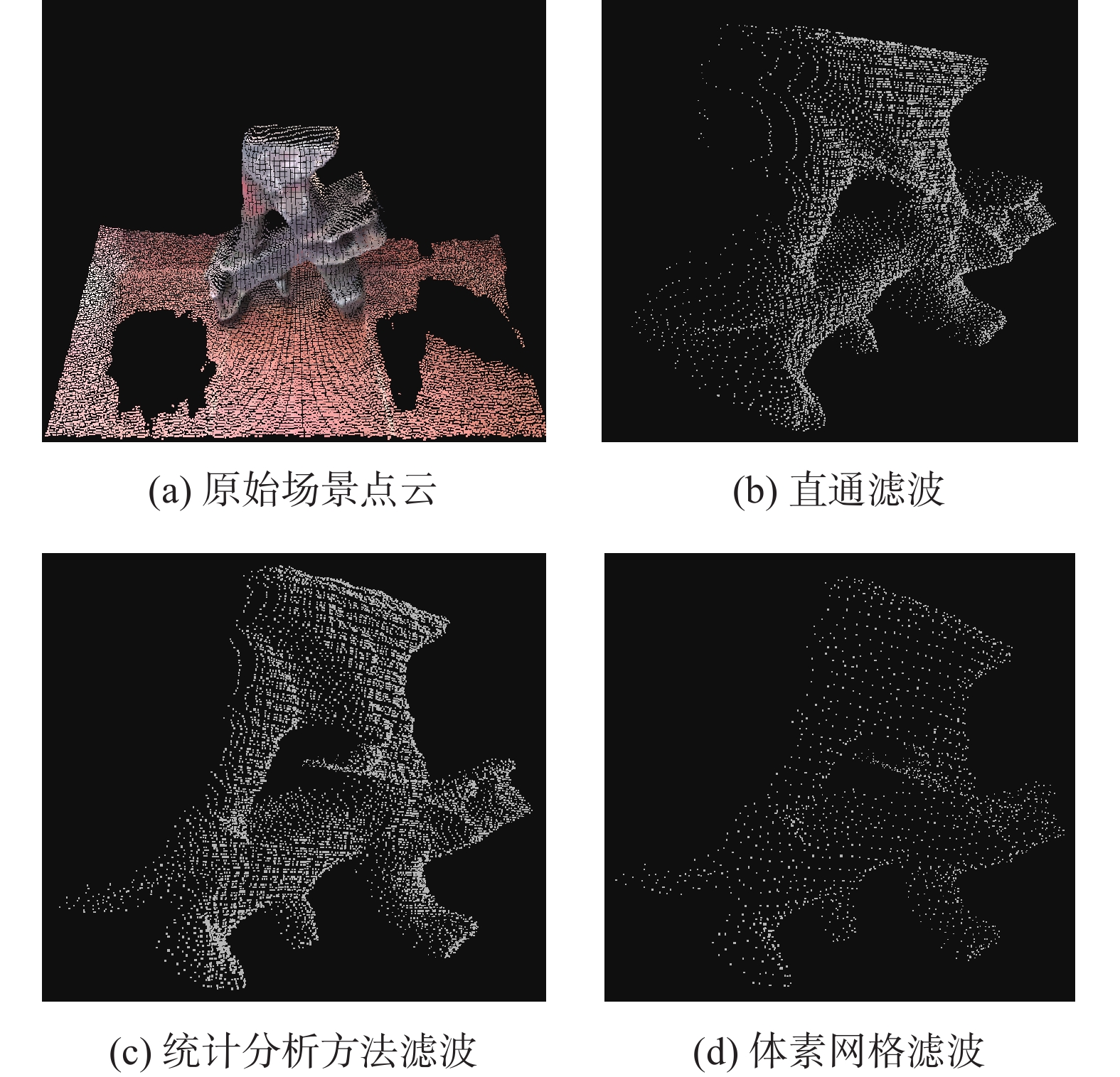
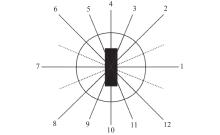
Fig.5
Multi-view point clouds acquisition"
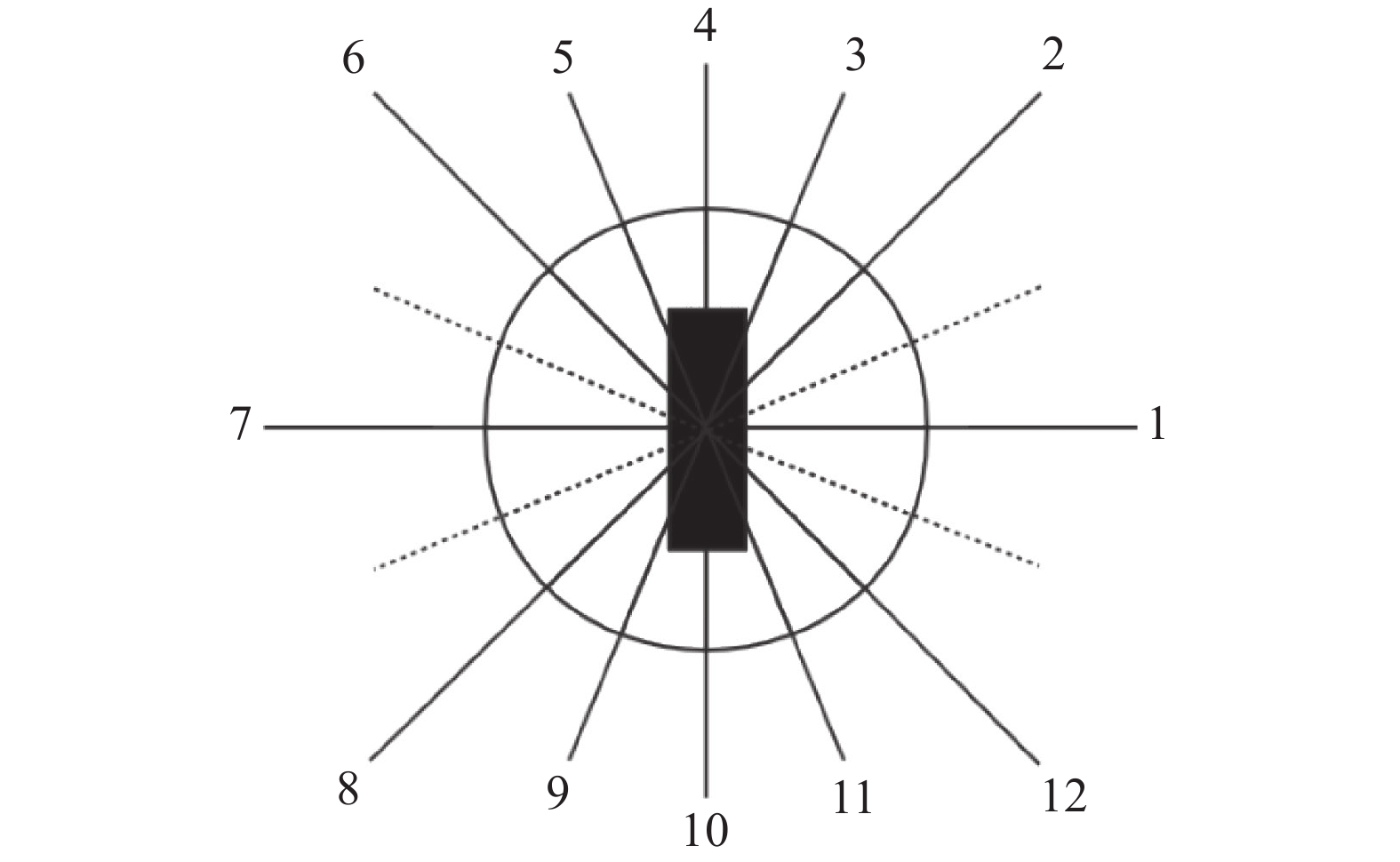
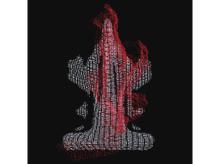
Fig.6
Registration failure caused by insufficient overlap"
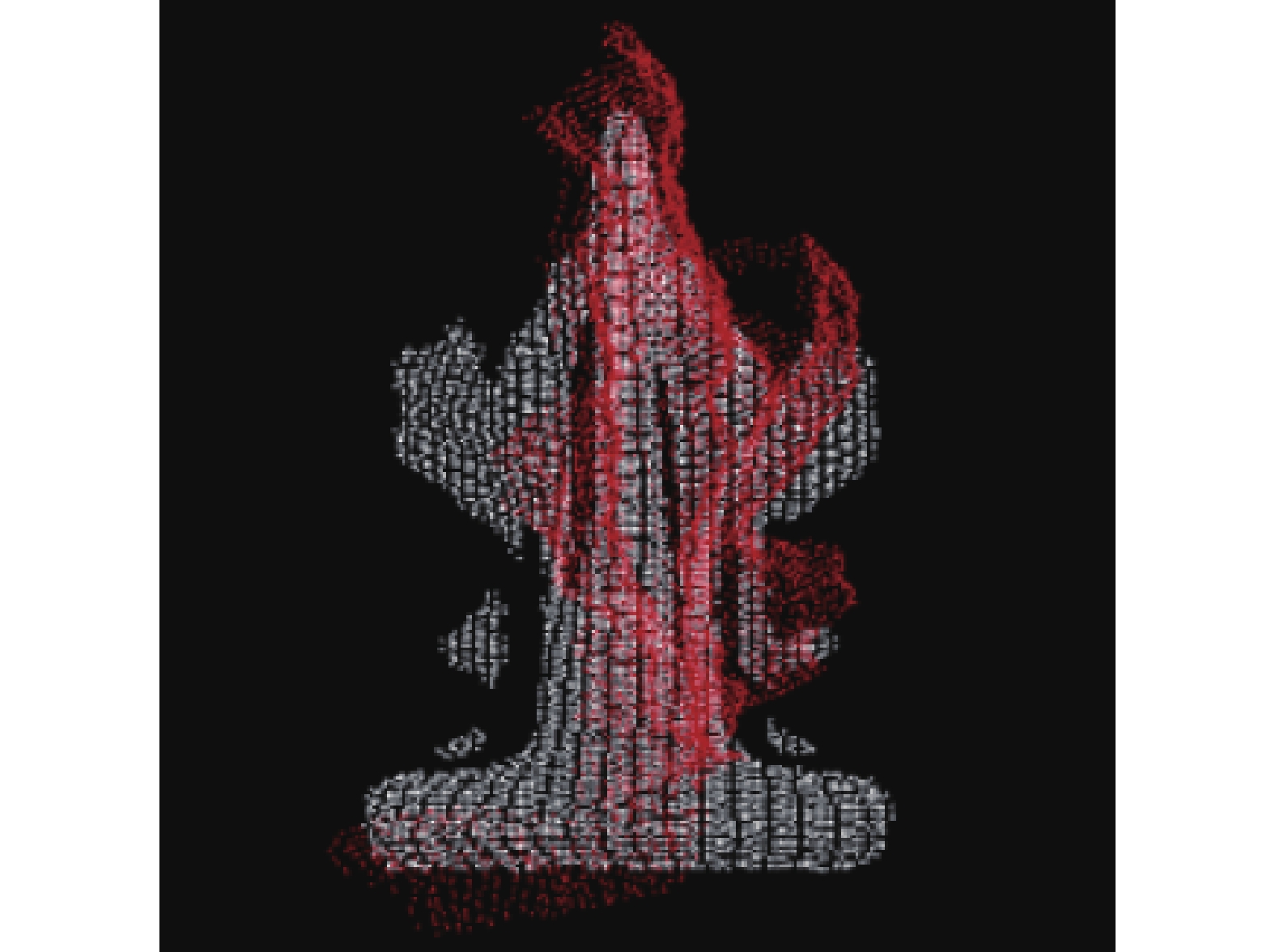
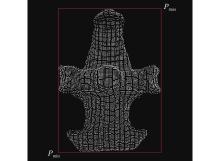
Fig.7
Bounding box of point cloud projection"
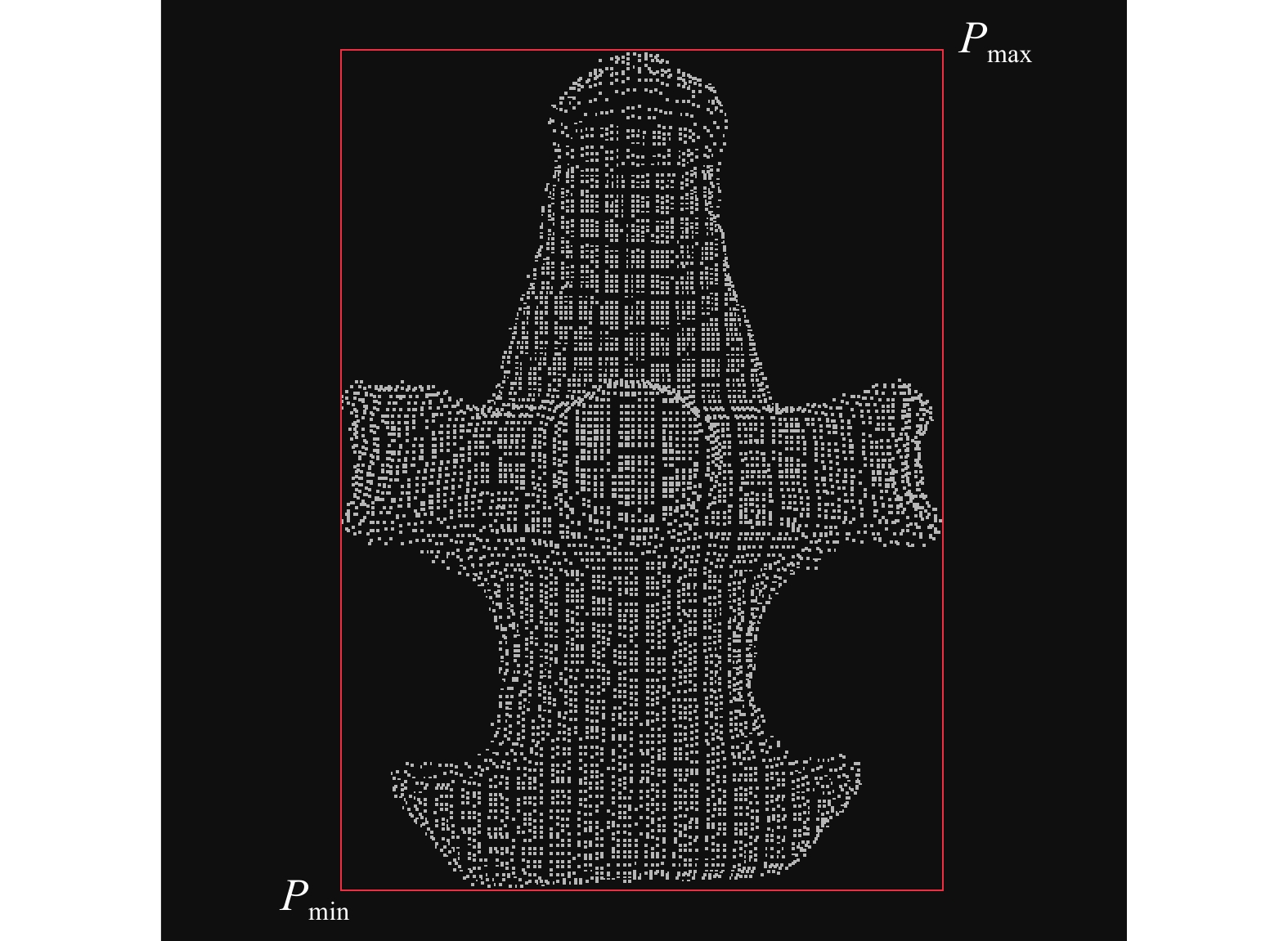
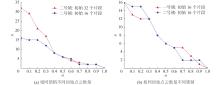
Fig.8
Relationship between the number of point clouds left, n, and the discarding coefficient, α "
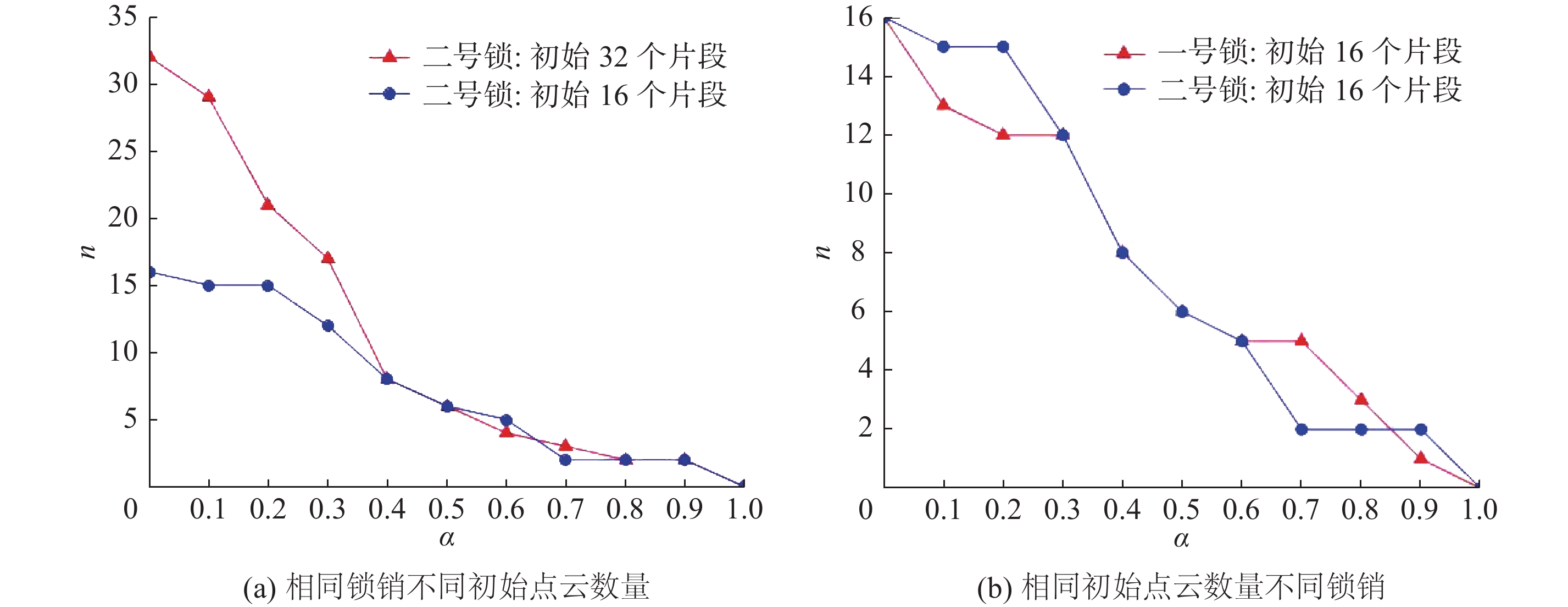

Fig.9
Multi-view point cloud screening results"
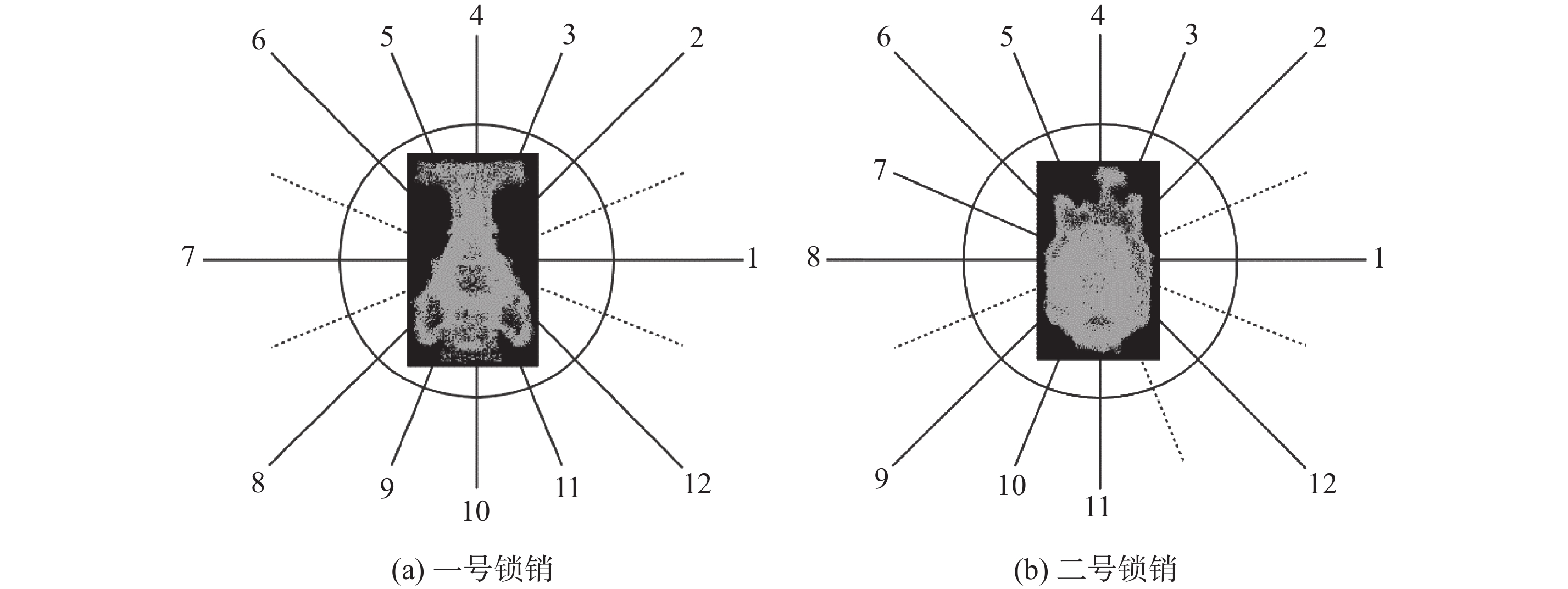

Fig.10
Left is the result of coarse registration, right is the result of precise registration (higher overlap)"
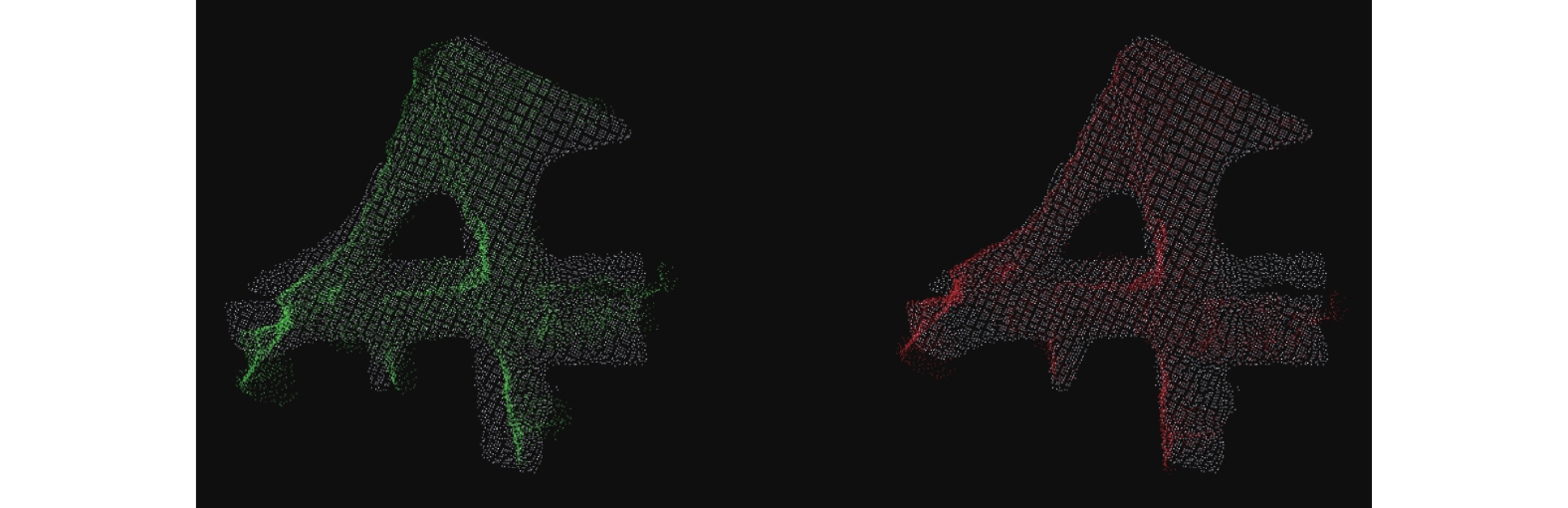

Fig.11
Left is the result of coarse registration, right is the result of precise registration (lower overlap)"
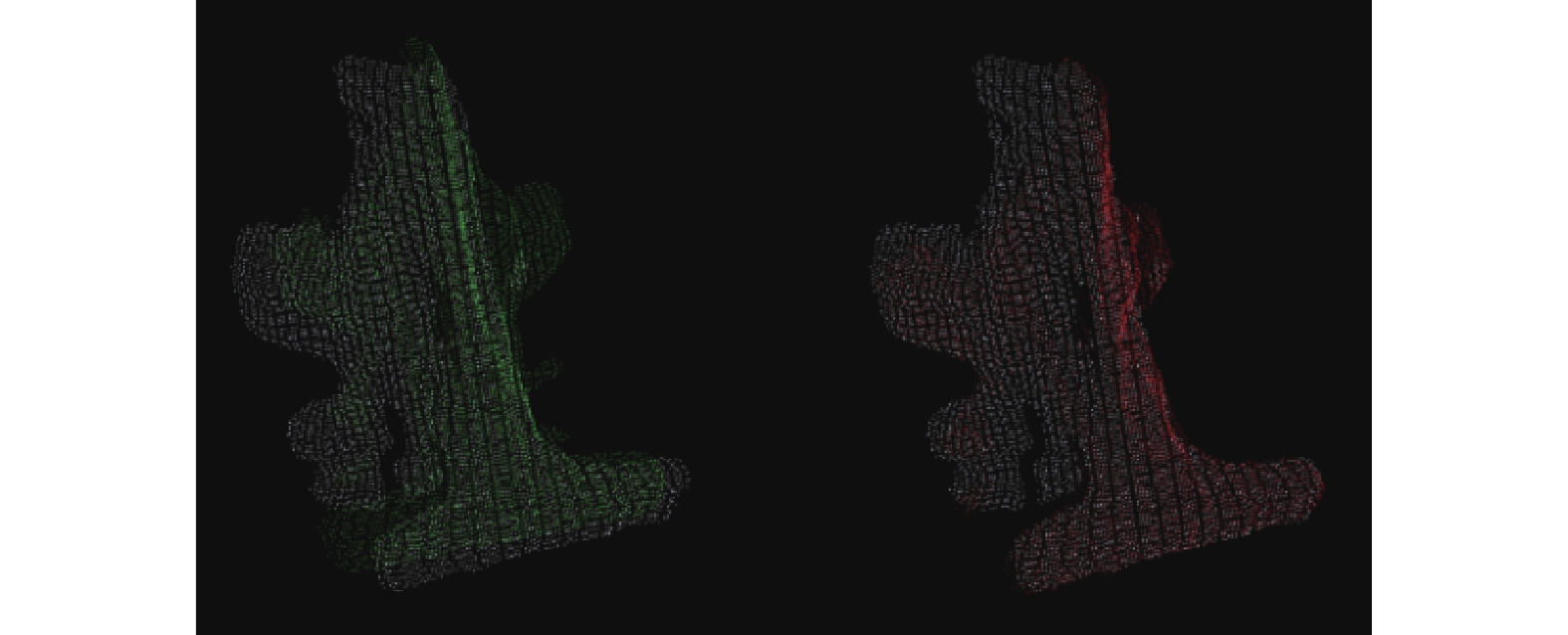

Fig.12
Model of No.1 lock pin point cloud"
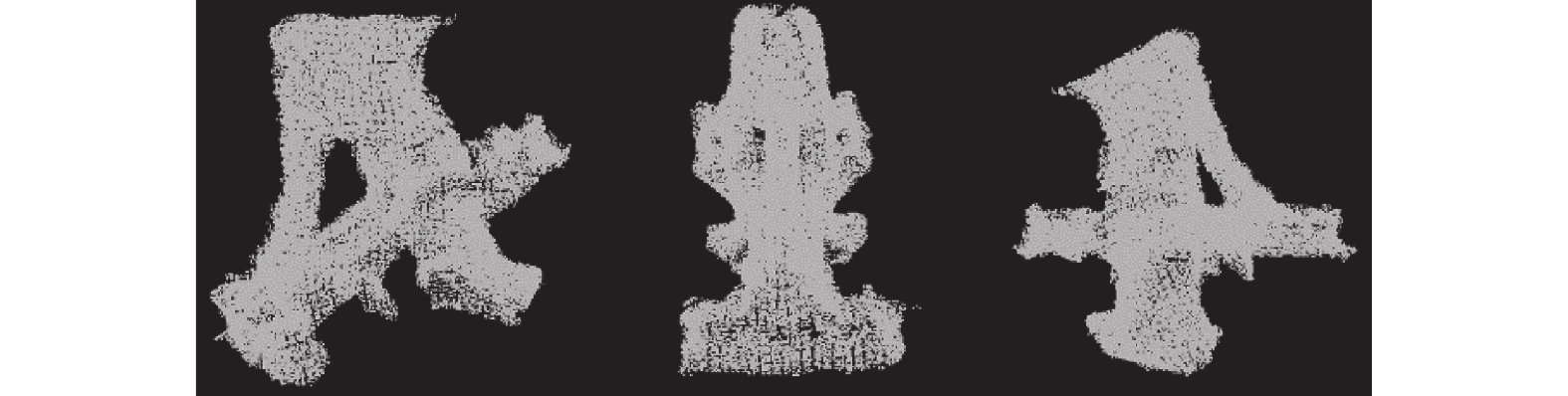

Fig.13
Model of No.2 lock pin point cloud"
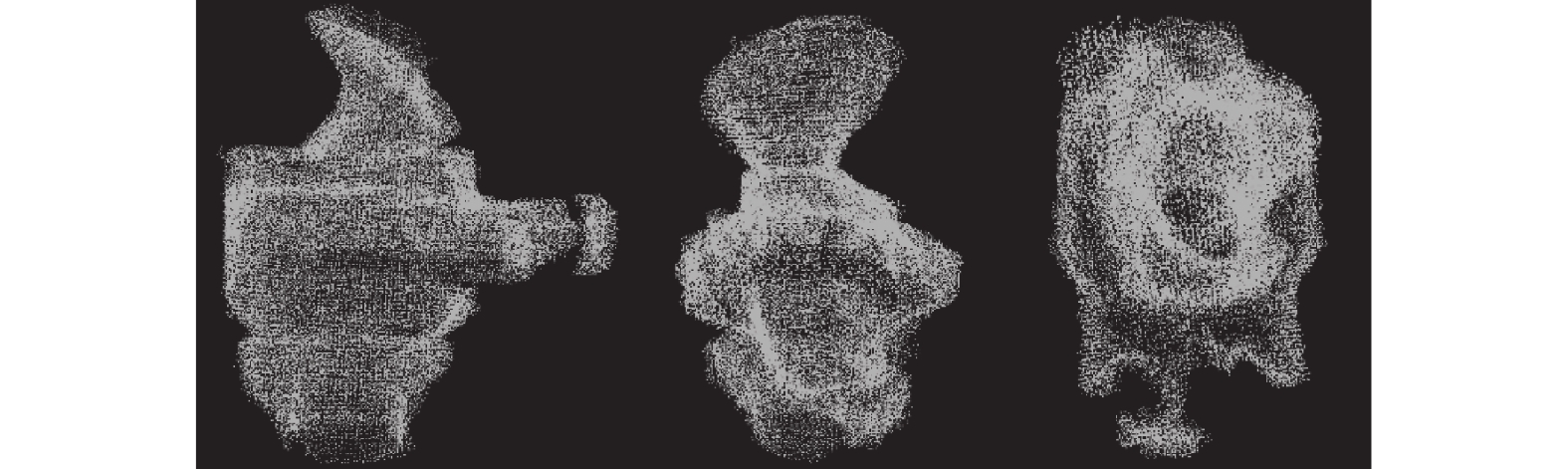
Table 1
SAC-IA coarse registration"
| 锁销类型 | 选择视角数/个 | 配准成功率/% | 平均运行时间/s |
| 8 | 71.4 | 25.718 | |
| 一号锁销 | 16 | 100.0 | 19.970 |
| 12 | 100.0 | 19.610 | |
| 8 | 57.1 | 32.481 | |
| 二号锁销 | 16 | 100.0 | 30.638 |
| 12 | 100.0 | 30.327 |
Table 2
ICP precise registration"
| 锁销类型 | 选择视角数/个 | 平均ICP迭代次数/次 | 平均运行时间/s | 平均均方误差/(104 × m2) |
| 8 | 85 | 2.803 | 3.6583 | |
| 一号锁销 | 16 | 57 | 1.457 | 1.0173 |
| 12 | 62 | 1.605 | 1.5372 | |
| 8 | 105 | 4.213 | 3.1379 | |
| 二号锁销 | 16 | 56 | 2.261 | 1.0081 |
| 12 | 60 | 2.332 | 1.5215 |
| 1 | 柳长满, 张传捷, 陈微波, 等. 国内沿海自动化集装箱码头关键技术发展趋势. 中国港口, 2021, (1): 17- 23. |
| 2 | 唐波, 高仕博, 张聪, 等. 智能感知技术在集装箱码头堆场智能装卸中的应用. 港口科技, 2021, (8): 1- 6,12. |
| 3 | 陆拥军. 集装箱码头锁销自动化拆装视觉定位系统研究. 港口装卸, 2019, (1): 56- 59. |
| 4 | 栾兮道, 应龙, 谢毓湘, 等. 三维建模技术研究进展. 计算机科学, 2008, 35 (2): 208- 210. |
| 5 | 姚晓山, 刘健鑫, 柯维. 多视点云拼接中的 ICP 算法优化. 微电子学与计算机, 2012, 29 (8): 94- 97. |
| 6 | 伍梦琦, 李中伟, 钟凯, 等. 基于几何特征和图像特征的点云自适应拼接方法. 光学学报, 2015, 35 (2): 237- 244. |
| 7 | 周春艳, 李勇, 邹峥嵘. 三维点云 ICP 算法改进研究. 计算机技术与发展, 2011, 21 (8): 75- 77,81. |
| 8 | NEWCOMBE R A, IZADI S, HILLIGES O, et al. KinectFusion: Real-time dense surface mapping and tracking [C]// IEEE International Symposium on Mixed and Augmented Reality. IEEE, 2012: 127-136. |
| 9 | BESL P J, MCKAY N D. A method for registration of 3-D shapes. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14 (2): 239- 256. |
| 10 | FUKAI H, XU G. Fast and robust registration of multiple 3D point clouds [C]// IEEE International Workshop on Robot and Human Communication (RO-MAN). IEEE, 2011: 331-336. |
| 11 | RUSU R B, BLODOW N, MARTON Z C, et al. Aligning point cloud views using persistent feature histograms [C]// 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2008: 3384-3391. |
| 12 | RUSU R B, BLODOW N, BEETZ M. Fast point feature histograms (FPFH) for 3D registration [C]// 2009 IEEE International Conference on Robotics and Automation. IEEE, 2009: 3212-3217. |
| 13 | MAGNUSSON M. The three-dimensional normal-distributions transform: An efficient representation for registration, surface analysis, and loop detection. Renewable Energy, 2009, 28 (4): 655- 663. |
| 14 | 李根龙. 面向机器人装配的目标识别与位姿获取技术研究 [D]. 西安: 西安理工大学, 2021. |
| 15 | 韩一菲, 杨紫骞, 郑福, 等. 基于FPFH和法向量的改进点云配准算法. 半导体光电, 2021, 42 (4): 579- 584. |
| 16 | 甘璐豪, 贺赛先. 低重叠度点云拼接方法研究. 激光杂志, 2019, 40 (3): 84- 90. |
| 17 | HENRY P, KRAININ M, HERBST E, et al. RGB-D mapping: Using kinect-style depth cameras for dense 3D modeling of indoor environments. International Journal of Robotics Research, 2012, 31 (5): 647- 663. |
| 18 | TÖLGYESSY M, DEKAN M, CHOVANEC L, et al. Evaluation of the Azure Kinect and its comparison to Kinect V1 and Kinect V2. Sensors, 2021, 21 (2): 413. |
| 19 | 宇文亮. 基于Kinect的物体模型建立及识别定位技术研究 [D]. 哈尔滨: 哈尔滨工业大学, 2018. |
| 20 | 陈学伟, 朱耀麟, 武桐, 等. 基于SAC-IA和改进ICP算法的点云配准技术. 西安工程大学学报, 2017, 31 (3): 395- 401. |
| [1] | Zehua WANG, Yan GAO, Mingang CHEN. A landscape simulation modeling method based on remote sensing images [J]. Journal of East China Normal University(Natural Science), 2023, 2023(2): 82-94. |
| [2] | Tiantian ZHANG, Man LAN. Target-dependent event detection from news [J]. Journal of East China Normal University(Natural Science), 2023, 2023(2): 60-72. |
| [3] | Xiaoqiu LU, Yang CAI, Jiajun CHEN, Xi ZHOU, Xueming ZHOU, Yunzhe TANG, Dingjiang HUANG. Fault location algorithm based on Kirchhoff ’s law and a Boolean equation [J]. Journal of East China Normal University(Natural Science), 2023, 2023(2): 143-154. |
| [4] | Yang ZHANG, Yejing LAI, Dingjiang HUANG. Device component state recognition method of power distribution cabinet based on a residual networks [J]. Journal of East China Normal University(Natural Science), 2023, 2023(2): 132-142. |
| [5] | Ziyin HUANG, Yuanbin WU. Distant supervision relation extraction via the influence function [J]. Journal of East China Normal University(Natural Science), 2022, 2022(6): 79-86. |
| [6] | Wei HE, Weiqing TONG. High resolution panorama generation method for irregular cylindrical murals [J]. Journal of East China Normal University(Natural Science), 2022, 2022(6): 102-122. |
| [7] | Ming WANG, Te LI, Dingjiang HUANG. Text matching based on multi-dimensional feature representation [J]. Journal of East China Normal University(Natural Science), 2022, 2022(5): 126-135. |
| [8] | Jizhou LI, Xin LIN. Neural architecture search algorithms based on a recursive structure [J]. Journal of East China Normal University(Natural Science), 2022, 2022(4): 31-42. |
| [9] | Xiaozhen ZHAO, Weiqing TONG, Yongmei LIU. A graph convolutional neural network for garment pattern classification [J]. Journal of East China Normal University(Natural Science), 2022, 2022(4): 56-66. |
| [10] | Shucheng LU, Yan GAO, Changbo WANG. Modeling and simulation technology of roads for a battlefield environment [J]. Journal of East China Normal University(Natural Science), 2022, 2022(4): 79-94. |
| [11] | Zejie WANG, Chaomin SHEN, Chun ZHAO, Xinmei LIU, Jie CHEN. Recognition of classroom learning behaviors based on the fusion of human pose estimation and object detection [J]. Journal of East China Normal University(Natural Science), 2022, 2022(2): 55-66. |
| [12] | Qinmin YANG, Zhisong JIANG. Design and implementation of automatic correction for college mathematics assignments [J]. Journal of East China Normal University(Natural Science), 2022, 2022(2): 76-83. |
| [13] | Guofang ZHANG, Lili WEN, Meng WU, Tongyu LIU, Kuanyun ZHENG, Fuxing HUANG, Peisen YUAN. Anomaly detection of transformer loss data based on a robust random cut forest [J]. Journal of East China Normal University(Natural Science), 2021, 2021(6): 135-146. |
| [14] | Xinye ZHANG, Weiqing TONG, Haisheng LI. A fast key points matching method for high resolution images of a planar mural [J]. Journal of East China Normal University(Natural Science), 2021, 2021(6): 65-80. |
| [15] | Dongqing HUANG, Liyang YU, Jue CHEN, Tongquan WEI. Research on joint computation offloading and resource allocation strategy for mobile edge computing [J]. Journal of East China Normal University(Natural Science), 2021, 2021(6): 88-99. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||